
Détecteurs polarimétriques pixellisés
Caméras polarimétriques pixellisées
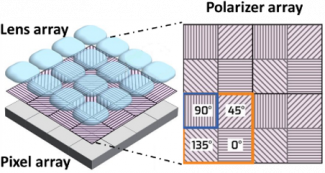
Dans les caméras polarimétriques à division de plan focal (DoFP), chaque pixel du capteur contient un polariseur d’orientation différente. En groupant 4 pixels voisins, on peut estimer l’état de polarisation de la lumière incidente (voir figure ci-dessous). Ces caméras connaissent un succès croissant car elles permettent d’acquérir une image polarimétrique de manière instantanée. De plus, les polariseurs étant intégrés directement sur le capteur, leurs propriétés sont très stables ce qui simplifie leur calibration. Ces caméras robustes, très simples d’utilisation et d’un coût modéré, ouvrent de nouveaux domaines d’application à l’imagerie polarimétrique.
Nouvelle méthode de calibration
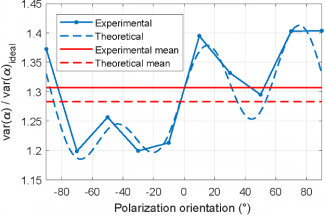
Nous avons proposé une méthode originale de calibration photométrique et polarimétrique de ces caméras et quantifié l’impact des défauts de fabrication sur la précision des mesures polarimétriques [1]. La figure ci-dessous représente l’évolution de la variance d’estimation de l’AOP en fonction de sa vraie valeur, et montre que les mesures expérimentales sont conformes aux prédictions théoriques.
Comment mesurer le vecteur de Stokes complet ?
Les caméras polarimériques pixellisées disponibles dans le commerce ne peuvent mesurer que le vecteur de Stokes linéaire, alors que dans de nombreuses applications, il est nécessaire de mesurer le vecteur de Stokes complet car sa composante circulaire peut contenir des informations utiles.
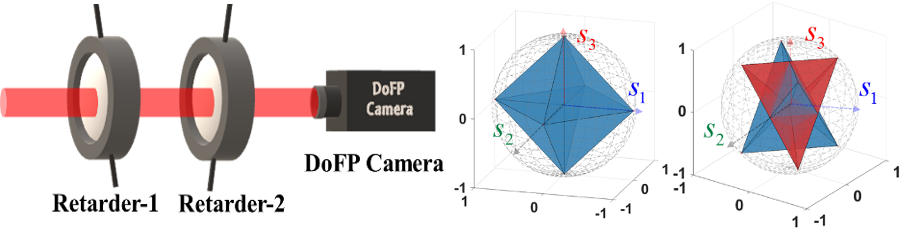
Pour résoudre ce problème, on peut placer un retardateur devant la caméra pixellisée et réaliser deux acquisitions d’images avec des positions différentes du retardateur [2]. Nous avons déterminé les paramètres du retardateur permettant d’optimiser la précision de mesure du vecteur de Stokes complet [3].
De plus, nous avons remarqué que les informations fournies par ces deux acquisitions d’images sont redondantes. Cette redondance peut être utilisée pour augmenter la résolution de l’image [3,4] ou réaliser une autocalibration du retardateur [5,6]. Par exemple, la figure ci-dessous montre le dispositif expérimental et deux exemples de configurations de mesure accessibles à partir de 2 acquisitions d’images [7].
Références
[1] S. Roussel, M. Boffety, F. Goudail, “Polarimetric precision of micropolarizer grid-based camera in the presence of additive and Poisson shot noise,” Opt. Express 26, 29968-29982 (2018).
[2] J. Qi, C. He, and D. S. Elson, "Real time complete Stokes polarimetric imager based on a linear polarizer array camera for tissue polarimetric imaging," Biomed. Opt. Express 8, 4933-4946 (2017).
[3] S. Roussel, M. Boffety, F. Goudail, “On the optimal ways to perform full Stokes measurements with a linear division-of-focal-plane polarimetric imager and a retarder,” Opt. Lett. 44, 2927-2930 (2019).
[4] X. Li, H. Hu, F. Goudail, T. Liu, “Fundamental precision limits of full Stokes polarimeters based on DoFP polarization cameras for an arbitrary number of acquisitions,” Opt. Express 27, 31261-31272 (2019).
[5] S. Shibata, N. Hagen, Y. Otani, "Robust full Stokes imaging polarimeter with dynamic calibration," Opt. Lett. 44, 891-894 (2019).
[6] F. Goudail, X. Li, M. Boffety, S. Roussel, T. Liu, H. Hu, “Precision of retardance autocalibration in full-Stokes division-of-focal-plane imaging polarimeters,” Opt. Lett. 44, 5410 -2413 (2019).
[7] X. Li, H. Hu, M. Boffety, S. Roussel, T. Liu, F. Goudail, “Optimal tradeoff between precision and sampling rate in DoFP imaging polarimeters,” Opt. Lett. 44 (2019).